Od dłuższego czasu planowałem budowę jakiegoś prostego robota, postanowiłem spróbować z gotowym zestawem, mój wybór padł na zestaw firmy Sparkfun z kontrolerem RedBot o nazwie RedBot Basic Kit, przedstawię relację z budowy tego robota. Zestaw dostarczany jest w kartonowym pudełku i zawiera:


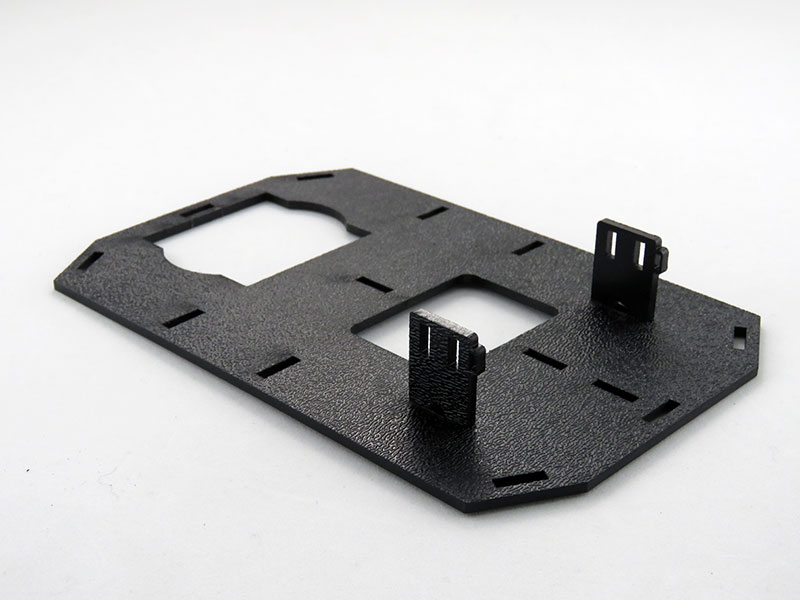
Podwozie wycięte jest z tworzywa ABS, złożenie podwozia nie wymaga użycia żadnych narzędzi, wszystkie elementy łączy się na zatrzaski. Na początku elastyczny materiał, z jakiego zrobione jest podwozie budził moje wątpliwości, ale po złożeniu podwozie jest naprawdę sztywne, porównywalnie ze skręcanymi podwoziami z pleksi.
Złożenie robota nie powinno zająć więcej niż kwadrans, zaczynamy od zamontowania uchwytów enkoderów do płyty dolnej:
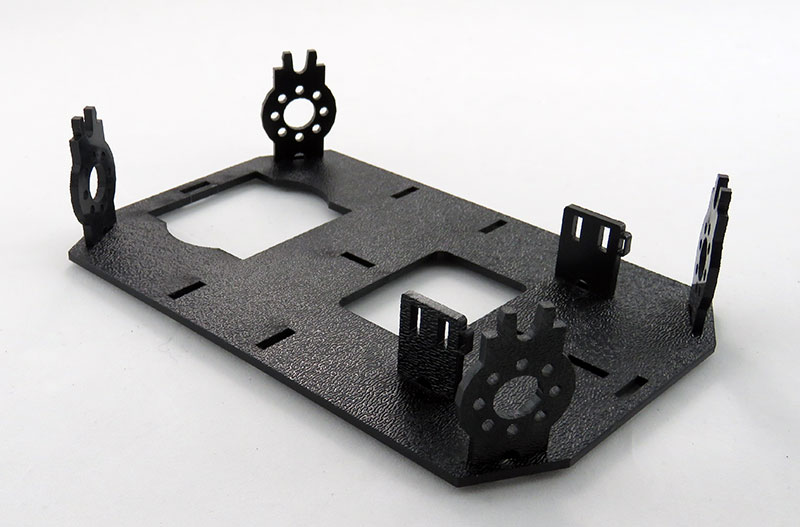
Montujemy narożne łączniki płyt górnej i dolnej:
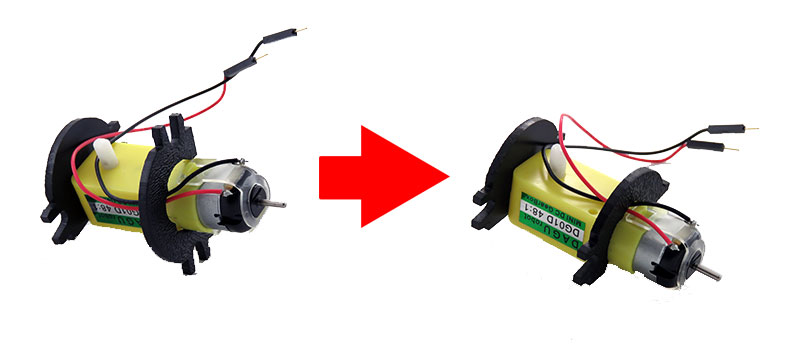
Zakładamy na silniki tylne mocowania silników, trzeba je nałożyć od góry zwracając uwagę, żeby przewody silnika znalazły się we wgłębieniu, następnie przekręcamy mocowanie o 90 stopni. Przy zakładaniu mocowań silników należy zwrócić uwagę, aby przewody wychodziły z silnika do wewnętrznej strony robota, na wypustkę z tyłu obudowy silnika nakładamy przednie mocowanie silnika:

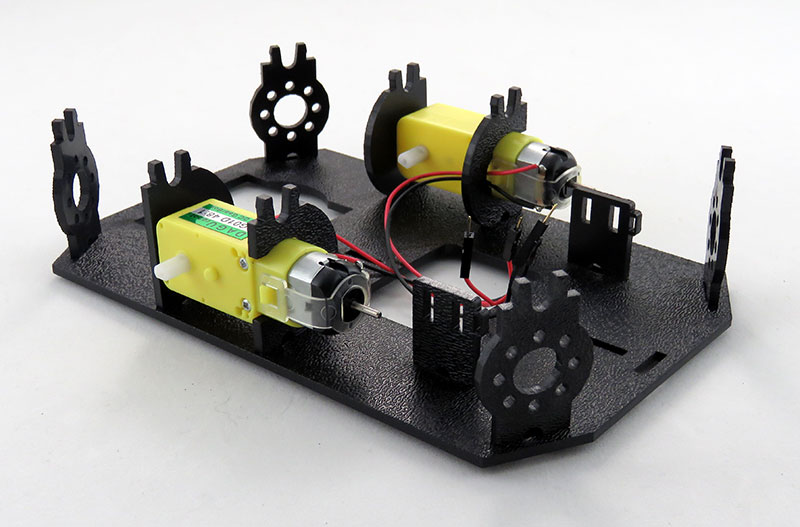
Teraz można zamocować silniki do dolnej płyty podwozia:
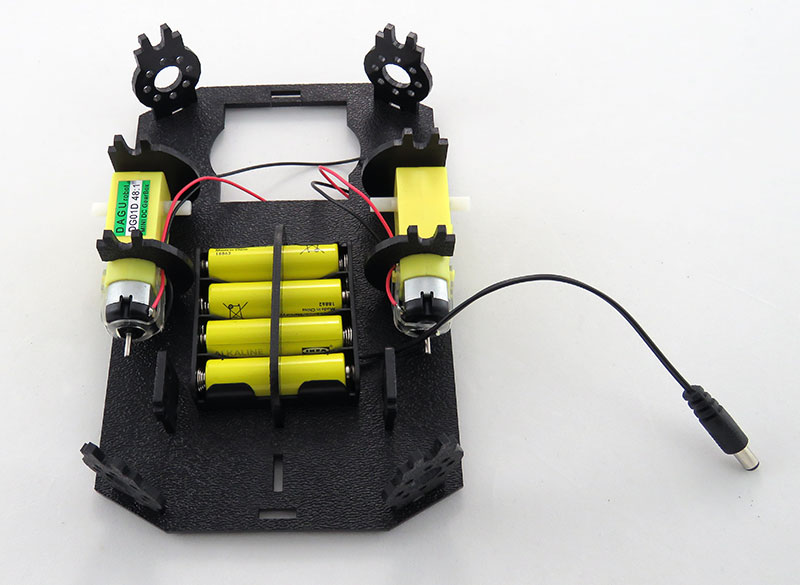
Umieszczamy na płycie dolnej koszyk na baterie i mocujemy go uchwytem. Ja zrezygnowałem z koszyka na rzecz pakietu LiPol, który na stałe zamontowałem na płycie dolnej za pomocą taśmy dwustronnej.
Do płyty dolnej montujemy podpórkę, zastępuje ona powszechnie stosowane kulki podporowe, muszę przyznać, że spełnia swoją rolę dość dobrze:
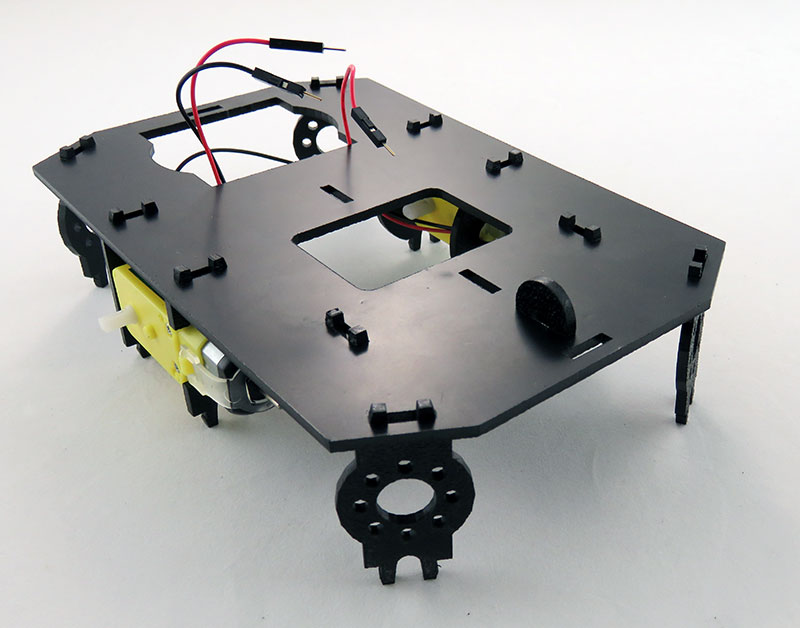
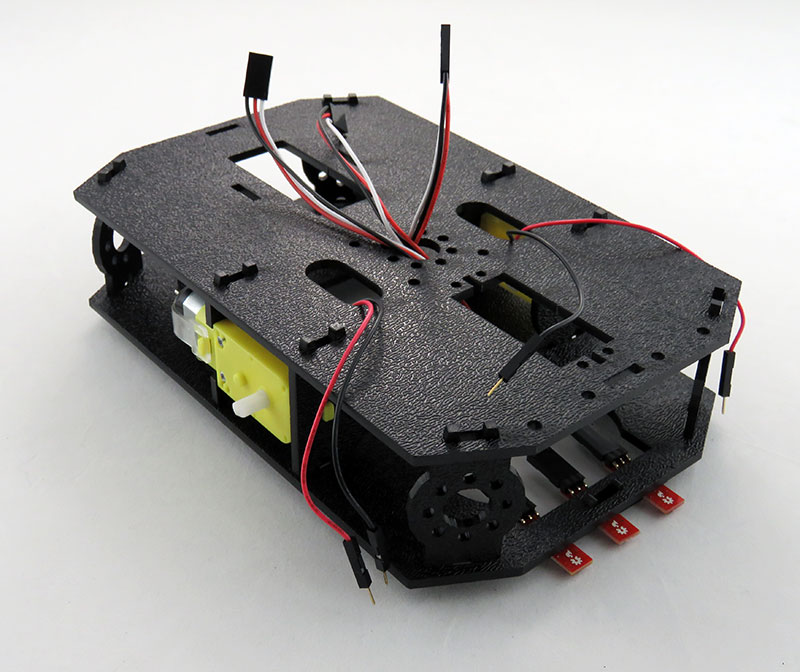
Na dolną część mocowania czujników line follower zakładamy moduły, następnie zakładamy górną część mocowania i montujemy od spodu dolnej płyty podwozia:

Podwozie jest gotowe do założenia płyty górnej:
Montujemy uchwyty dla płytki kontrolera i umieszczamy w nich płytkę RedBot (według producenta uchwyt pasuje też m.in. do Raspberry Pi oraz Arduino):
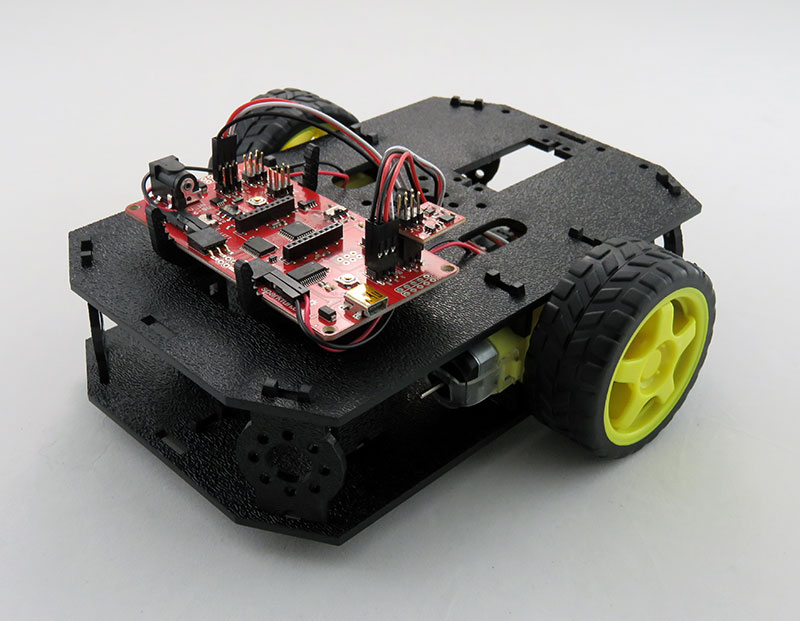
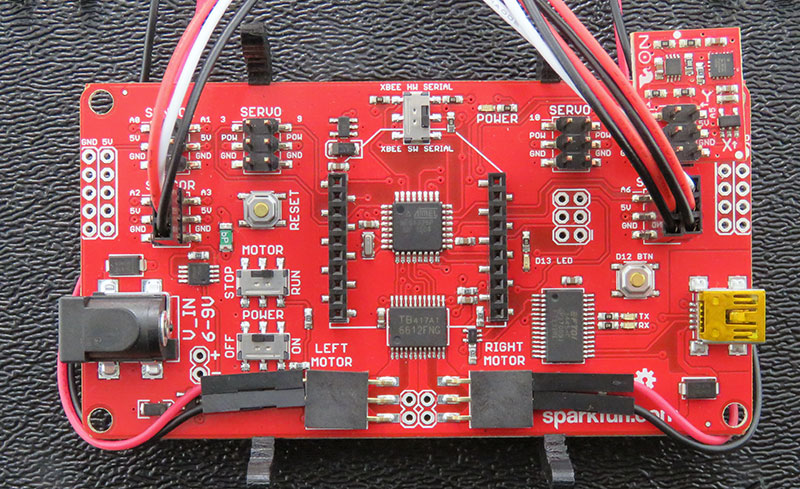
Pozostaje tylko dołączenie silników, czujników line follower i modułu akcelerometru do RedBota:
- silniki dołączamy do złącz LEFT MOTOR i RIGHT MOTOR
- akcelerometr dołączamy do złącza SENSOR w prawym górnym rogu (jest kilka złącz z oznaczeniem SENSOR)
- czujniki odbiciowe IR dołączamy do złącz SENSOR, które mają wyprowadzone linie A3, A6 i A7 (można je dołączyć inaczej, to jest konfiguracja przyjęta w przykładach biblioteki RedBot)
Teraz można przystąpić do przetestowania robota. W tym celu trzeba zainstalować biblioteki RedBota w Arduino, biblioteki pobieramy z
githuba, katalog
Arduino/libraries/RedBot kopiujemy do katalogu
<ścieżka_arduino>/libraries. Po uruchomieniu Arduino w menu
Plik>Przykłady mamy nową kategorię
RedBot, znajduje się w niej 11 przykładowych programów, które pozwalają przetestować funkcje robota. Programowanie odbywa się analogicznie jak dla Arduino UNO. Co nie do końca mi się podoba: w kontrolerze RedBot zastosowano gniazdo mini-USB, które wychodzi powoli z użycia, a w zestawie nie ma kabla.

